科学家基于多种材料创造出柔软且可扩展的机械手
基于软材料的机器人通常更擅长复制人类和动物的外观、动作和能力。虽然现在有无数的软机器人,但由于其组件成本高昂或制造工艺复杂,其中许多很难大规模生产。
葡萄牙科英布拉大学的研究人员最近开发了一种新型软机器人手,其价格更便宜且更容易制造。他们的设计在Cyborg和BionicSystems中引入,将软执行器与外骨骼集成在一起,这两者都可以使用可扩展技术来生产。
“大多数机器人都是由刚性材料制成的,”进行这项研究的研究人员之一佩德罗·内托告诉TechXplore。“然而,当我们观察动物时,我们注意到它们的身体可以由坚硬的部分(骨骼)和柔软的部分(例如肌肉)组成。有些动物,比如蚯蚓,是完全软体的。从大自然中汲取灵感,我们预计下一代机器人将采用软材料制成的组件,或者在某些情况下,它们可以完全是软体的。”
与刚性机器人相比,软体机器人系统更安全,并且可以在室外和室内环境中更好地与人类或动物共存。例如,如果它们与周围的人类、动物或物体发生碰撞,这些机器人不太可能造成重大损坏或伤害。
Neto和他的同事最近工作的主要目标是开发一种既安全又实惠的新型软机器人手。从理论上讲,这样的手更容易大规模部署,从而推动机器人领域的新研究和创新。
“我们在实际制造手之前利用有限元分析来优化设计,从而降低了原型制作成本,”Neto解释道。“通过直接在软质材料中打印一些组件并在刚性材料中打印模具,事实证明常规3D打印的使用是有效的。”
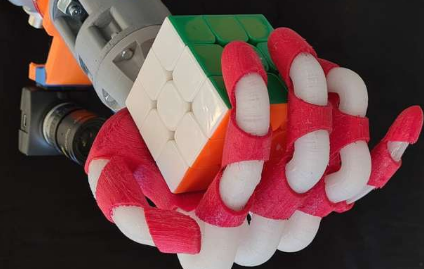
Neto和他的同事创造的软机器人手基于几种不同的材料。其精心设计的结构旨在复制人手的外观和功能,再现他们的动作和能力。
“机械手的配置由五个软执行器组成,每个执行器对应一个手指,以及一个提高手指弯曲能力的外骨骼,”内托说。“开关控制器保持指定的手指弯曲角度,使手能够有效地抓住不同形状、重量和尺寸的物体。”
到目前为止,研究人员通过一系列模拟和实验评估了机械手的性能。他们的初步结果非常有希望,因为手可以成功地抓住许多不同形状、重量和大小的物体。
“主要的贡献是集成的设计制造系统,该系统利用有限元分析在制造之前优化设计,”内托说。“这一成就有可能提高软机器人手的可及性,同时降低成本并消除通常依赖于资源密集型迭代工作流程的通常耗时的设计制造程序。”
未来,学术团队和个人机器人专家都可以使用该研究团队开发的软机器人手来测试新的人工智能(AI)算法和其他旨在提高机器人能力的计算工具。此外,其设计可以为低成本制造人形机器人开辟新途径,帮助人类进行日常活动。
“我们接下来的研究将集中于改进软执行器和传感器的制造,旨在提高软机器人对更广泛受众的可及性,”内托补充道。“利用人工智能控制软机器人是我们正在研究的另一个研究课题。”
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
【别克gl8商务车怎么样】别克GL8自推出以来,凭借其出色的舒适性、空间表现和品牌口碑,成为国内高端商务用车...浏览全文>>
-
【别克gl8商务车油耗是多少】别克GL8作为一款经典的商务车型,凭借其宽敞的内部空间、舒适的乘坐体验和较高的...浏览全文>>
-
【别克gl8商务车油耗多少】别克GL8是一款非常受欢迎的中大型MPV,广泛用于商务接待、家庭出行以及出租车等场景...浏览全文>>
-
【别克gl8商务车价格多少】别克GL8作为一款经典的商务车型,凭借其舒适性、空间表现以及品牌口碑,深受企业用...浏览全文>>
-
【别克gl8商务车价格】作为一款在国内市场广受好评的中高端商务车型,别克GL8凭借其宽敞的内部空间、舒适的乘...浏览全文>>
-
【别克gl8商务车多少钱】别克GL8作为一款经典的商务车型,凭借其舒适性、空间表现和品牌口碑,在国内市场上一...浏览全文>>
-
【别克gl8商务车的参数是怎样的】作为一款在商务用车市场中备受青睐的车型,别克GL8凭借其宽敞的空间、舒适的...浏览全文>>
-
【别克gl8商务车参数】作为一款在市场上备受关注的中高端商务车型,别克GL8凭借其宽敞的空间、舒适的驾乘体验...浏览全文>>
-
【别克gl8商务车报价参数配置】别克GL8作为一款经典的商务车型,凭借其宽敞的内部空间、舒适的乘坐体验以及较...浏览全文>>
-
【别克excelle是哪款车】“别克Excelle”这一名称在汽车市场中并不常见,可能是对别克某款车型的误写或翻译差...浏览全文>>