尖端无人机技术GPS干扰环境中动态目标跟踪的新方法
《工程》杂志上发表的一项研究介绍了一种新颖的基于图像的视觉伺服(IBVS)方法,用于无人机(UAV)在GPS无法识别的环境中跟踪动态目标。
这篇题为“不可预测干扰下无人机的动态目标跟踪”的研究文章提出了一种综合方法,可解决在存在外部干扰的情况下估计目标速度、图像深度估计和跟踪稳定性的挑战。
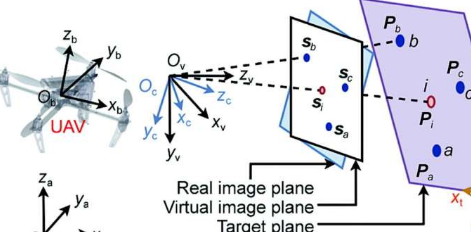
所提出的方法利用构建的虚拟相机来导出欠驱动无人机的简化且解耦的图像动力学。通过考虑动态目标不可预测的旋转和速度引起的不确定性,研究人员开发了一种独特的图像深度模型,该模型扩展了IBVS方法以跟踪任意方向的旋转目标。该模型保证了精确的图像特征跟踪和旋转目标的平滑轨迹。
为了估计无人机与动态目标之间的相对速度,设计了速度观测器。该观测器消除了平移速度测量的需要,并减轻了由含噪声测量引起的控制颤振。此外,还引入了基于积分的滤波器来补偿不可预测的环境干扰,从而增强了无人机的抗干扰能力。
使用Lyapunov方法对速度观测器和IBVS控制器的稳定性进行了严格分析。通过对比仿真和多阶段实验,验证了该方法在动态旋转目标下的跟踪稳定性、抗干扰能力和跟踪鲁棒性。
这项研究的主要贡献包括:
新颖的图像深度模型:研究人员提出了一种独特的图像深度模型,无需跟踪目标的旋转信息即可准确估计图像深度。该模型使得所提出的IBVS控制器的应用能够跟踪任意方向的动态旋转目标。
速度观测器:设计了专用的速度观测器,用于估计无人机与动态目标之间的相对速度。这使得所提出的方法可以在GPS拒绝的环境中使用,同时减轻由含噪声的速度测量引起的控制颤动。
基于积分的滤波器:基于积分的滤波器已被开发用于估计和补偿不可预测的干扰,包括动态目标的加速度和环境干扰。这增强了无人机处理动态目标未知运动和外部干扰的能力。
总之,本研究提出了一种动态IBVS方法,可显着提高无人机在存在不可预测干扰的情况下的跟踪性能。通过利用速度观测器、新颖的图像深度模型和基于积分的滤波器,该方法增强了跟踪稳定性、抗干扰能力和鲁棒性。
利用Lyapunov理论对该方法的稳定性进行了深入分析,并通过仿真和实验验证了其有效性。
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
【别克gl8商务车怎么样】别克GL8自推出以来,凭借其出色的舒适性、空间表现和品牌口碑,成为国内高端商务用车...浏览全文>>
-
【别克gl8商务车油耗是多少】别克GL8作为一款经典的商务车型,凭借其宽敞的内部空间、舒适的乘坐体验和较高的...浏览全文>>
-
【别克gl8商务车油耗多少】别克GL8是一款非常受欢迎的中大型MPV,广泛用于商务接待、家庭出行以及出租车等场景...浏览全文>>
-
【别克gl8商务车价格多少】别克GL8作为一款经典的商务车型,凭借其舒适性、空间表现以及品牌口碑,深受企业用...浏览全文>>
-
【别克gl8商务车价格】作为一款在国内市场广受好评的中高端商务车型,别克GL8凭借其宽敞的内部空间、舒适的乘...浏览全文>>
-
【别克gl8商务车多少钱】别克GL8作为一款经典的商务车型,凭借其舒适性、空间表现和品牌口碑,在国内市场上一...浏览全文>>
-
【别克gl8商务车的参数是怎样的】作为一款在商务用车市场中备受青睐的车型,别克GL8凭借其宽敞的空间、舒适的...浏览全文>>
-
【别克gl8商务车参数】作为一款在市场上备受关注的中高端商务车型,别克GL8凭借其宽敞的空间、舒适的驾乘体验...浏览全文>>
-
【别克gl8商务车报价参数配置】别克GL8作为一款经典的商务车型,凭借其宽敞的内部空间、舒适的乘坐体验以及较...浏览全文>>
-
【别克excelle是哪款车】“别克Excelle”这一名称在汽车市场中并不常见,可能是对别克某款车型的误写或翻译差...浏览全文>>