团队开发出具有可变体轴灵活性的蜈蚣机器人
大阪大学机械科学与生物工程系的研究人员发明了一种新型步行机器人,它利用动态不稳定性进行导航。通过改变联轴器的灵活性,可以使机器人转向而不需要复杂的计算控制系统。这项工作可能有助于创造能够穿越不平坦地形的救援机器人。
地球上的大多数动物都进化出了一种强大的运动系统,它使用腿来为它们提供在广泛环境中的高度机动性。有点令人失望的是,试图复制这种方法的工程师经常发现有腿机器人出奇地脆弱。由于反复的压力,即使是一条腿的故障也会严重限制这些机器人的功能。
此外,控制大量关节使机器人能够穿越复杂的环境需要大量的计算机能力。这种设计的改进对于构建可以充当探索或救援车辆并进入危险区域的自主或半自主机器人非常有用。
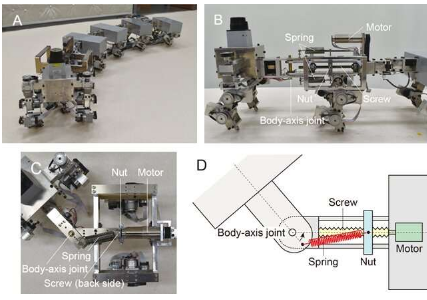
现在,大阪大学的研究人员开发了一种仿生“myriapod”机器人,它利用自然的不稳定性,可以将直线行走转化为曲线运动。在最近发表在SoftRobotics上的一项研究中,大阪大学的研究人员描述了他们的机器人,该机器人由六个部分(每个部分连接两条腿)和灵活的关节组成。使用可调螺钉,联轴器的灵活性可以在步行运动中通过电机进行修改。
研究人员表明,增加关节的灵活性会导致一种称为“干草叉分叉”的情况,直走变得不稳定。相反,机器人过渡到以曲线模式行走,向右或向左。通常,工程师会尽量避免造成不稳定。然而,有控制地使用它们可以实现高效的机动性。
“我们受到某些极其敏捷的昆虫的启发,这种能力使它们能够控制自己运动中的动态不稳定性,从而引起快速的运动变化,”该研究的作者ShinyaAoi说。由于这种方法不直接控制身体轴的运动,而是控制灵活性,因此可以大大降低计算复杂度和能量需求。
该团队测试了机器人到达特定位置的能力,发现它可以通过沿着弯曲的路径朝向目标进行导航。“我们可以预见在各种场景中的应用,例如搜索和救援、在危险环境中工作或在其他星球上探索,”另一位研究作者MauAdachi说。未来的版本可能包括额外的部分和控制机制。
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
【别克gl8商务车怎么样】别克GL8自推出以来,凭借其出色的舒适性、空间表现和品牌口碑,成为国内高端商务用车...浏览全文>>
-
【别克gl8商务车油耗是多少】别克GL8作为一款经典的商务车型,凭借其宽敞的内部空间、舒适的乘坐体验和较高的...浏览全文>>
-
【别克gl8商务车油耗多少】别克GL8是一款非常受欢迎的中大型MPV,广泛用于商务接待、家庭出行以及出租车等场景...浏览全文>>
-
【别克gl8商务车价格多少】别克GL8作为一款经典的商务车型,凭借其舒适性、空间表现以及品牌口碑,深受企业用...浏览全文>>
-
【别克gl8商务车价格】作为一款在国内市场广受好评的中高端商务车型,别克GL8凭借其宽敞的内部空间、舒适的乘...浏览全文>>
-
【别克gl8商务车多少钱】别克GL8作为一款经典的商务车型,凭借其舒适性、空间表现和品牌口碑,在国内市场上一...浏览全文>>
-
【别克gl8商务车的参数是怎样的】作为一款在商务用车市场中备受青睐的车型,别克GL8凭借其宽敞的空间、舒适的...浏览全文>>
-
【别克gl8商务车参数】作为一款在市场上备受关注的中高端商务车型,别克GL8凭借其宽敞的空间、舒适的驾乘体验...浏览全文>>
-
【别克gl8商务车报价参数配置】别克GL8作为一款经典的商务车型,凭借其宽敞的内部空间、舒适的乘坐体验以及较...浏览全文>>
-
【别克excelle是哪款车】“别克Excelle”这一名称在汽车市场中并不常见,可能是对别克某款车型的误写或翻译差...浏览全文>>