人造软表面自主模仿自然形状
杜克大学的工程师开发了一种可扩展的柔软表面,可以不断重塑自身以模仿自然界中的物体。依靠电磁驱动、机械建模和机器学习来形成新的配置,表面甚至可以学会适应诸如破损元素、意外约束或不断变化的环境等障碍。
该研究于9月21日在线发表在《自然》杂志上。
“我们受到动态控制工程对象的材料特性或机械行为的想法的启发,这可能对软机器人、增强现实、仿生材料和特定主题的可穿戴设备等应用有用,”倪晓月说,杜克大学机械工程和材料科学助理教授。“我们专注于设计尚未预先确定的物质形状,这是一项艰巨的任务,尤其是对于软材料而言。”
根据Ni的说法,以前关于变形物质的工作通常不是可编程的。它已被编程。也就是说,配备有设计活性元素的柔软表面可以在几种形状之间转换它们的形状,比如一张折纸,以响应光或热或其他刺激触发。相比之下,Ni和她的实验室想要创造一些更可控的东西,可以随意变形和重新配置成任何物理上可能的形状。
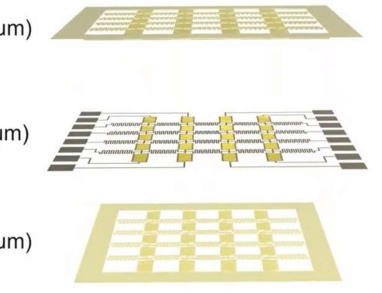
为了创造这样一个表面,研究人员首先布置了一个蛇形梁网格,该梁由一层薄薄的金制成,由一层薄的聚合物层包裹。单个梁只有八微米厚——大约是棉纤维的厚度——宽度不到一毫米。光束的轻盈使得磁力可以轻松快速地使它们变形。
为了产生局部力,将表面置于低水平静磁场中。电压变化沿黄金网格产生复杂但易于预测的电流,从而驱动网格的平面外位移。
“这是第一个足够快的人造软表面,可以准确地模拟自然界中连续的变形过程,”Ni说。“一个关键的进步是结构设计,它使电输入和最终形状之间存在不寻常的线性关系,这使得很容易弄清楚如何施加电压来实现各种目标形状。”
新的“超表面”展示了各种各样的变形和模仿技能。它会产生凸起并在表面周围移动,就像一只猫试图从毯子下找到出路,摆动的波浪图案,以及令人信服的液滴滴落和扑通一声落在固体表面上的复制。它以所需的任何速度或加速度产生这些形状和行为,这意味着它可以以慢动作或快进方式重新想象被困的猫或滴落的水滴。
通过监控变形表面的摄像头,柔术表面也可以学会自己重新创建形状和图案。通过缓慢调整施加的电压,学习算法接收3D成像反馈并计算出不同输入对超表面形状的影响。
在论文中,一个带有16个黑点的人手掌在摄像机下缓慢移动,表面完美地反映了这一动作。
“控制不需要了解材料的物理特性,它只需要小步走,观察它是否越来越接近目标,”Ni说。“目前实现新形状大约需要两分钟,但我们希望最终改进反馈系统和学习算法,使其接近实时。”
因为表面教会自己通过反复试验来移动,所以它还可以适应损坏、意外的物理限制或环境变化。在一项实验中,它很快学会了模仿一个隆起的土丘,尽管它的一根梁被切断了。在另一种情况下,尽管权重被附加到网格的一个节点上,但它设法模仿了类似的形状。
有许多直接的机会可以扩展软表面的规模和配置。例如,表面阵列可以将尺寸放大到触摸屏的尺寸。或者更高精度的制造技术可以将尺寸缩小到一毫米,使其更适合生物医学应用。
展望未来,Ni希望创建具有集成形状感应功能的机器人超曲面,以对自然界中复杂的动态表面(例如水波纹、鱼鳍或人脸)进行实时形状模仿。该实验室还可能考虑在原型中嵌入更多组件,例如车载电源、传感器、计算资源或无线通信能力。
“随着对创造可编程和机器人材料的追求,我们设想未来的材料将能够改变自身以动态和交互地服务功能,”Ni说。“这种材料可以感知和感知用户的需求或信息,并根据其特定性能的实时需求进行变换和适应,就像BigHero6中的微型机器人一样。柔软的表面可以作为遥控机器人的应用,动态3D显示器、伪装、外骨骼或其他智能、功能性表面,可以在恶劣、不可预测的环境中工作。”
免责声明:本文由用户上传,与本网站立场无关。财经信息仅供读者参考,并不构成投资建议。投资者据此操作,风险自担。 如有侵权请联系删除!
-
【别克gl8商务车怎么样】别克GL8自推出以来,凭借其出色的舒适性、空间表现和品牌口碑,成为国内高端商务用车...浏览全文>>
-
【别克gl8商务车油耗是多少】别克GL8作为一款经典的商务车型,凭借其宽敞的内部空间、舒适的乘坐体验和较高的...浏览全文>>
-
【别克gl8商务车油耗多少】别克GL8是一款非常受欢迎的中大型MPV,广泛用于商务接待、家庭出行以及出租车等场景...浏览全文>>
-
【别克gl8商务车价格多少】别克GL8作为一款经典的商务车型,凭借其舒适性、空间表现以及品牌口碑,深受企业用...浏览全文>>
-
【别克gl8商务车价格】作为一款在国内市场广受好评的中高端商务车型,别克GL8凭借其宽敞的内部空间、舒适的乘...浏览全文>>
-
【别克gl8商务车多少钱】别克GL8作为一款经典的商务车型,凭借其舒适性、空间表现和品牌口碑,在国内市场上一...浏览全文>>
-
【别克gl8商务车的参数是怎样的】作为一款在商务用车市场中备受青睐的车型,别克GL8凭借其宽敞的空间、舒适的...浏览全文>>
-
【别克gl8商务车参数】作为一款在市场上备受关注的中高端商务车型,别克GL8凭借其宽敞的空间、舒适的驾乘体验...浏览全文>>
-
【别克gl8商务车报价参数配置】别克GL8作为一款经典的商务车型,凭借其宽敞的内部空间、舒适的乘坐体验以及较...浏览全文>>
-
【别克excelle是哪款车】“别克Excelle”这一名称在汽车市场中并不常见,可能是对别克某款车型的误写或翻译差...浏览全文>>